Test adaptivních tempomatů kontra V2X komunikace (Car2Car)
- Tiskové zprávy
 Dne 6. 12. 2019 se zástupce naší firmy zúčastnil unikátního experimentu vědců z ČVUT a to z pohledu chování systému V2X (Car2Car). Experiment se týkal chování kolony vozidel, v níž jsou všechna vozidla vybavena adaptivními tempomaty (Adaptive Cruise Control - ACC). Cílem experimentu bylo ověřit, zda se i u adaptivních tempomatů vyskytuje tzv. řetězová (stringová) nestabilita. Na experimentu se podílelo 12 vozů s adaptivními tempomaty (ACC), se kterými přijeli jejich majitelé a testu se zúčastnili jako dobrovolníci. Jednalo se o různé značky a modely vozů. Tato vozidla pak jezdila v koloně po letišti Mnichovo Hradiště. Další reportáže z experimentu jsou uvedeny na stránkách médií:
Dne 6. 12. 2019 se zástupce naší firmy zúčastnil unikátního experimentu vědců z ČVUT a to z pohledu chování systému V2X (Car2Car). Experiment se týkal chování kolony vozidel, v níž jsou všechna vozidla vybavena adaptivními tempomaty (Adaptive Cruise Control - ACC). Cílem experimentu bylo ověřit, zda se i u adaptivních tempomatů vyskytuje tzv. řetězová (stringová) nestabilita. Na experimentu se podílelo 12 vozů s adaptivními tempomaty (ACC), se kterými přijeli jejich majitelé a testu se zúčastnili jako dobrovolníci. Jednalo se o různé značky a modely vozů. Tato vozidla pak jezdila v koloně po letišti Mnichovo Hradiště. Další reportáže z experimentu jsou uvedeny na stránkách médií:
Kromě GPS a akcelerometru, kterými vozy vybavilo ČVUT, vybavila naše společnost Ing. Ivo Herman, CSc. auta i jednotkami s komunikací V2X (komunikační jednotka UCU 5.0), tedy vozidlo – vozidlo (Car2Car). Takto se i další vozy v koloně, které nebyly přímo za vedoucím vozem (leaderem), mohly dozvědět o jeho akcích mnohem dříve, než se akce prvního vozu projevily na změně vzdálenosti k vozu jedoucím přímo před ním.
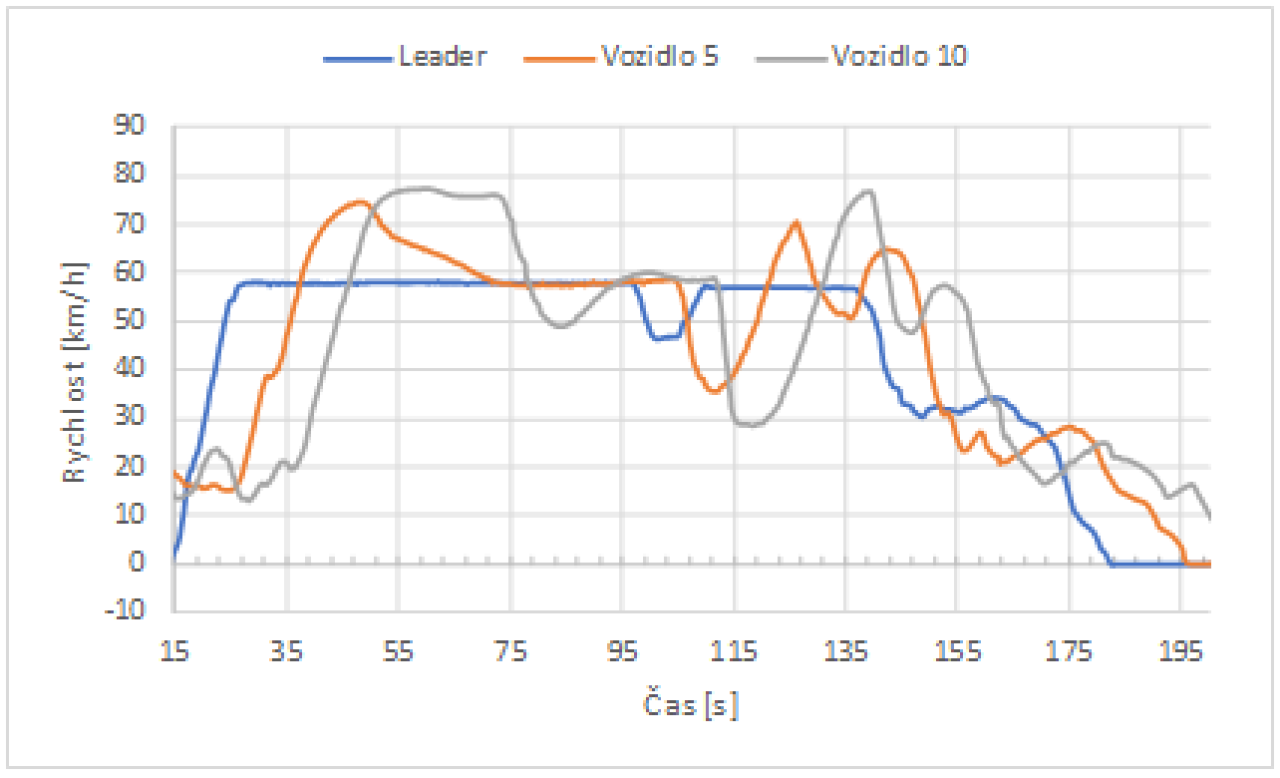
Průběhy rychlostí leadera, pátého a desátého vozu. V čase přibližně 95 sekund od začátku experimentu leader na asi 5 sekund zpomalil z 60 na 50 km/h a pak se zase vrátil zpět. Páté vozidlo reagovalo zpomalením na 35 km/h (čas 105 sekund) a desáté dokonce na 30 km/h (čas 115 sekund). Toto zesilování poměrně malé změny v rychlosti leadera je známo jako řetězová nestabilita.
Proběhlo několik jízd v koloně s adaptivními tempomaty, přičemž nejzajímavější je experiment, kdy vedoucí vůz (leader) zpomalil z 60 km/h na 50 km/h a pak zase zrychlil zpět na 60 km/h. Data z našich jednotek V2X (komunikační jednotky UCU 5.0 xx) ukazuje graf na obrázku. Na grafu je tato změna rychlosti leadera vidět mezi sekundami 95 a 110 - předtím se všechny vozy ustalovaly na požadované rychlosti. Jak plyne i z našich dat na obrázku, řetězová nestabilita se naplno projevila - páté auto na drobný výkyv v rychlosti prvního vozu reagovalo výraznějším zpomalením a zrychlením. Desáté auto pak zpomalilo ještě mnohem vice - místo poklesu o 10 km/h zpomalilo o skoro 30 km/h. Ačkoliv tedy vedoucí vozidlo provedlo malou změnu rychlosti, poslední vozidlo v koloně zpomalilo výrazně. Pokud by bylo vozidel ještě více, poslední by bylo nuceno úplně zastavit. A to navzdory autonomnímu řízení. Toto chovaní má samozřejmě výrazně nepříznivý vliv na plynulost a bezpečnost provozu.
Chování vozů tak v podstatě potvrdilo dřívější teoretické výzkumy na ČVUT, na kterých se výrazně podíleli i lidé, kteří dnes pracují u nás v oblasti V2X.
Řetězovou nestabilitu tedy vykazují vozy ovládané jak lidskými řidiči, tak i řízené adaptivním tempomatem. Jak ale řetězovou nestabilitu odstranit? Možnosti jsou v zásadě dvě:
- Navrhnout regulátor vzdálenosti pro adaptivní tempomaty tak, aby splnily podmínky, uvedené v dizertační práci. Toto ale nemusí být vždy možné, vzhledem k dynamickým vlastnostem konkrétního vozu a jeho řídicím systémům.
- Zajistit, aby vozidla mezi sebou komunikovala a sdílela tak svůj stav s minimálním zpožděním (Car2Car komunikace). To zajistí mnohem rovnoměrnější "regulaci" chování vozidel v koloně.
Ukázat možnosti V2X bylo cílem naší účasti na experimentu. Graf uvedený na obrázku č. 2, zobrazuje data přijatá přes V2X na doprovodném vozidle (nebylo součástí testovací kolony vozidel s adaptivními tempomaty a jelo vždy poslední). Je z něj jasně vidět, že každé auto mohlo o změně rychlosti leadera (prvního vozidla) vědět v podstatě ihned, když k ní došlo, přenosem informací přes komunikaci V2X (Car2Car). Pro desáté auto tedy nebylo třeba čekat 15 sekund, než začalo brzdit a tuto informaci vyhodnotilo pomocí senzorů obdobným způsobem jako člověk, ale mohlo postupně zpomalovat ihned, jakmile tak učinil leader díky radiovým zprávám. Pokud by toto udělalo každé vozidlo, řetězová nestabilita může vymizet. To potvrzují i některé experimenty v akademickém prostředí.
Ve zkratce se dá říci, že až se zrychlení/zpomalení vozu projeví na vzdálenosti k němu, může být již pozdě na správnou reakci. Je třeba o chování vozu vědět dříve. Tomu má právě komunikace V2X napomoci.
A jaká je praktické řešení v MHD - např. zabránit srážkám u tramvají, kdy souprava vpředu zasílá bezprostředně informace o brždění a tramvaje za ní mohou bezprostředně reagovat. Naše praktické zkoušky toto prokázaly 3.12.2015 .